Arduino Nano 33 Sense Rev2
What is the IMU sensor?
IMU stands for: inertial measurement unit. It is an electronic device that measures and reports a body's specific force, angular rate and the orientation of the body, using a combination of accelerometers, gyroscopes, and oftentimes magnetometers. Know more.
Library
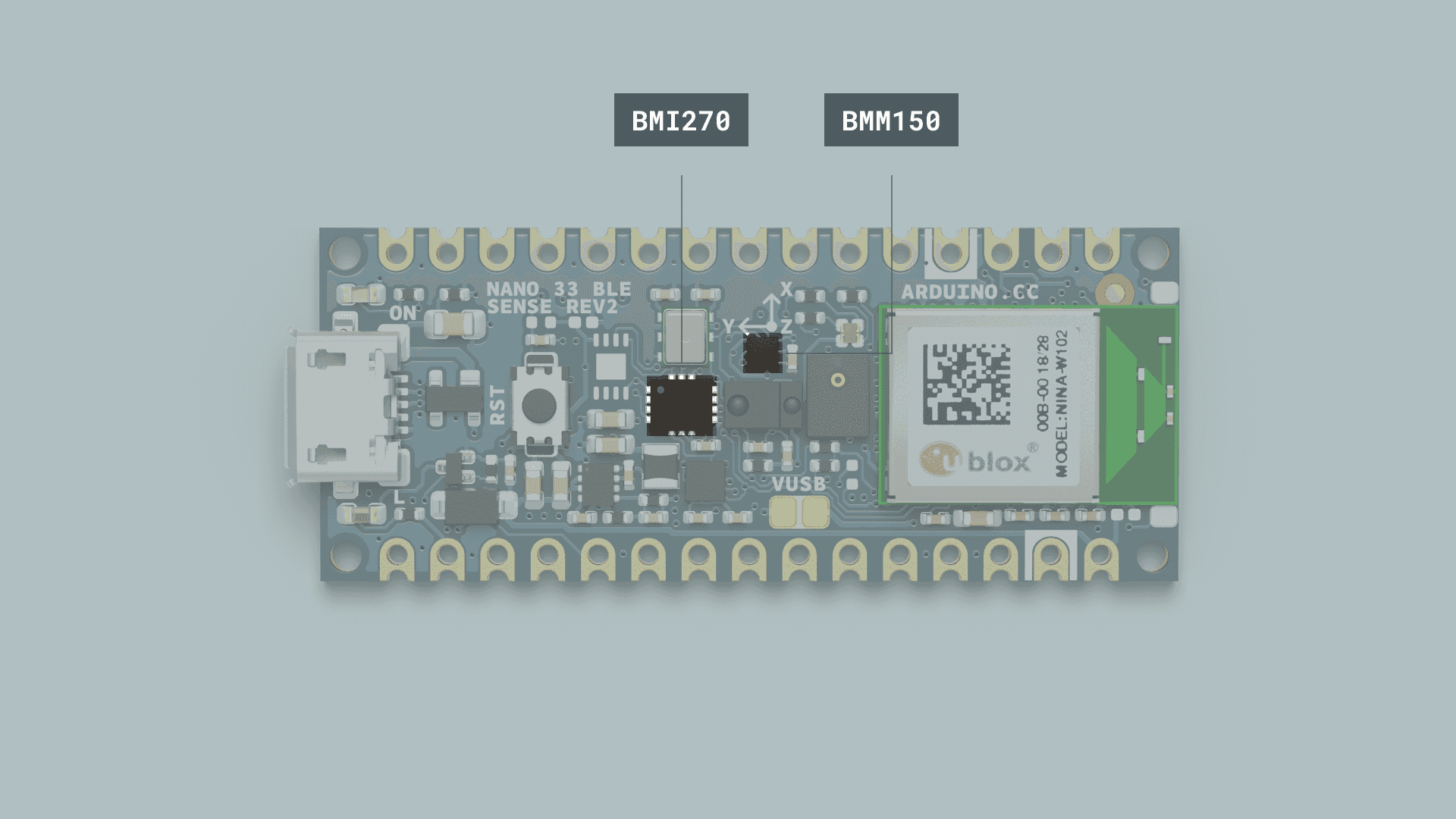
The IMU system on the Arduino Nano 33 BLE Sense Rev2 is a combination of two modules, the 6-axis BMI270, and the 3-axis BMM15.
To use the IMU (inertial measurement unit) in Nano 33 BLE Rev2 and Nano 33 BLE Sense Rev2, you need to use the Arduino_BMI270_BMM150 library instead of Arduino_LSM9DS1 which is used in all example code.
Replace #include <Arduino_LSM9DS1.h> with #include <Arduino_BMI270_BMM150.h> in all existing codes if you are using Rev2 boards.
For more information about libraries for NANO 33 SENSE REV2, please visit here.
Getting started - Accelerometers & Gyroscopes
To detect rotations and speed.
#include "Arduino_BMI270_BMM150.h"
float x, y, z;
int degreesX = 0;
int degreesY = 0;
void setup() {
Serial.begin(9600);
while (!Serial);
Serial.println("Started");
if (!IMU.begin()) {
Serial.println("Failed to initialize IMU!");
while (1);
}
Serial.print("Accelerometer sample rate = ");
Serial.print(IMU.accelerationSampleRate());
Serial.println(" Hz");
}
void loop() {
float x, y, z;
if (IMU.accelerationAvailable()) {
IMU.readAcceleration(x, y, z);
if(x > 0.1){
x = 100*x;
degreesX = map(x, 0, 97, 0, 90);
Serial.print("Tilting up ");
Serial.print(degreesX);
Serial.println(" degrees");
}
if(x < -0.1){
x = 100*x;
degreesX = map(x, 0, -100, 0, 90);
Serial.print("Tilting down ");
Serial.print(degreesX);
Serial.println(" degrees");
}
if(y > 0.1){
y = 100*y;
degreesY = map(y, 0, 97, 0, 90);
Serial.print("Tilting left ");
Serial.print(degreesY);
Serial.println(" degrees");
}
if(y < -0.1){
y = 100*y;
degreesY = map(y, 0, -100, 0, 90);
Serial.print("Tilting right ");
Serial.print(degreesY);
Serial.println(" degrees");
}
}
}
Getting started - Magnetometer
To detect magnetic fields.
#include "Arduino_BMI270_BMM150.h"
float x,y,z, ledvalue;
void setup() {
if (!IMU.begin()) {
Serial.println("Failed to initialize IMU!");
while (1);
}
}
void loop() {
// read magnetic field in all three directions
IMU.readMagneticField(x, y, z);
if(x < 0)
{
ledvalue = -(x);
}
else{
ledvalue = x;
}
analogWrite(LED_BUILTIN, ledvalue);
delay(500);
}