How to send data to Processing from Arduino
What is the Serial Communication?
Serial communication is the process of sending data one bit at a time, sequentially, over a communication channel or computer bus. Simply put, serial communication is the communication between two or more computers with binary data.
In this tutorial, we will use serial communication protocol to send data to Processing from Arduino. The Processing sketch will be controlled by the physical component, the ultrasonic sensor, which can be replaced with other sensors, button and etc.
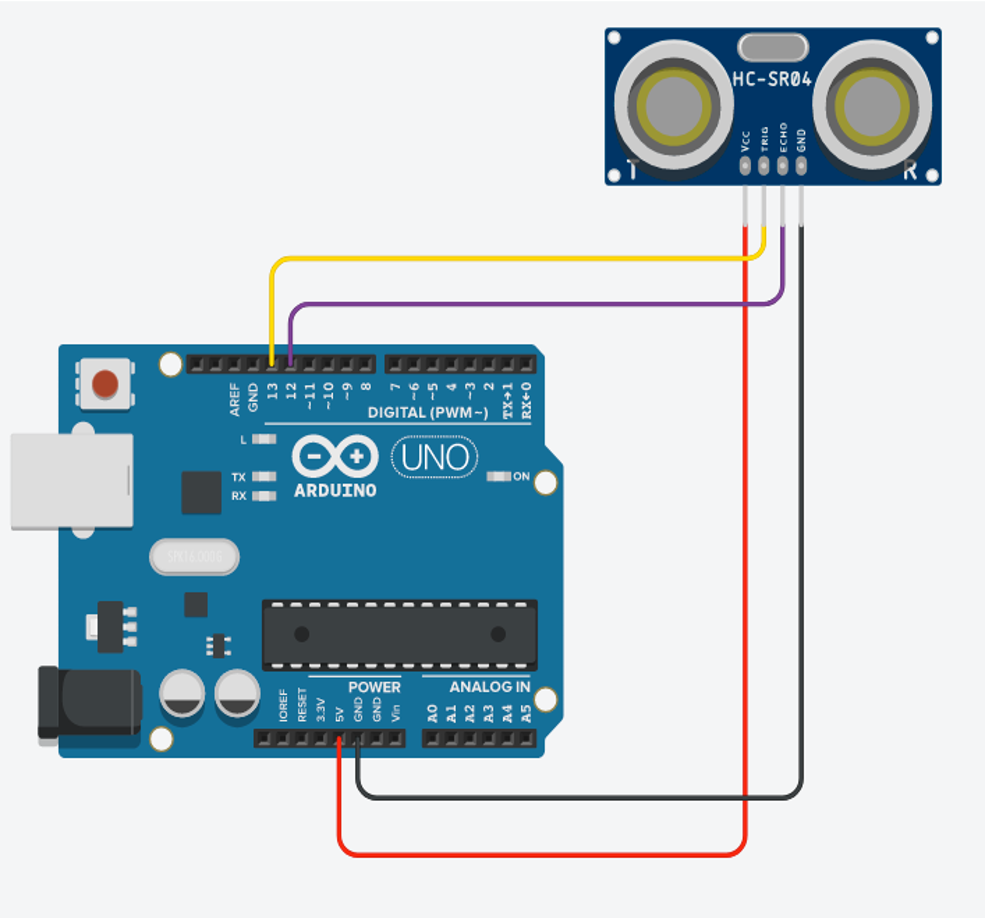
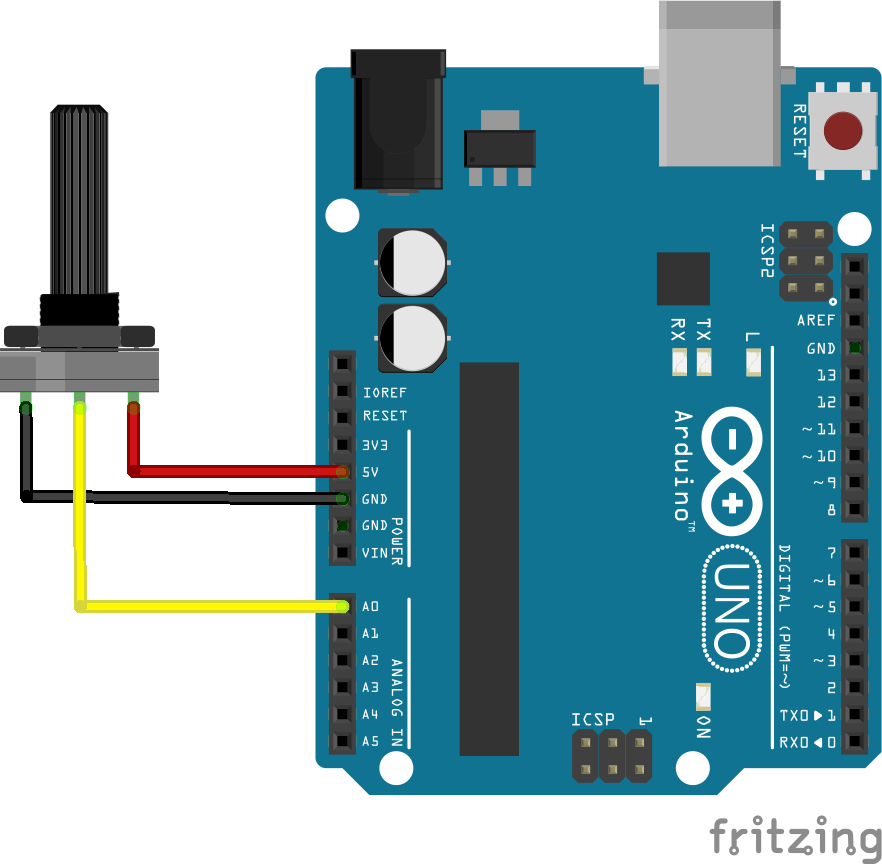
Wiring
PowerLeft(VCCpin to5V)5VGroundRight(GNDpin toGND)GNDEchomiddle pin todigital pin 12Trigger to digital pin 13A0
Arduino Code
This example sends the distance measured from Arduino to Processing via the serial port, you can read the data from the serial monitor.
#include#define <HCSR04.h>potPin //A0
Initializeint sensor that uses digital pins 13 and 12.
UltraSonicDistanceSensor distanceSensor(13, 12);value;
void setup (setup() {
Serial.begin(9600); //intailise WeSerial initializecommunication serialwith connection9600 sobaud thatrate
wepinMode( couldpotPin, printINPUT values from sensor.);
}
void loop (loop() {
value = analogRead( potPin);
Serial.println(value); // Every 500 miliseconds, do a measurement usingread the sensor and printsend the distancevalue into centimeters.the Serial.println(distanceSensor.measureDistanceCm())Serial
delay(100); delay(500);//little delay to prevent Arduino going crazy
}
Processing Code
This example used the data received from Arduino to control the degrees of rotation of a rectangle in Processing.
import processing.serial.*;
Serial myPort;
String val;
int datanum = 0; //number of data receiving from Arduino
int value1;
//int value2; //multiple data from arduino if needed
void setup() {
size(800, 800);
printArray(Serial.list()); //show all ports
String portName = Serial.list()[0];//choose the correct port
myPort = new Serial(this, portName, 9600);
myPort.bufferUntil('\n');
}
void draw() {
background(0);//map() pushMatrix();is rotate(a important function to use here,
//it convert the raw data range from Arduino to the ideal range to use in Processing
//map(a, b, c, d, e) has 5 Parameters
//map(theVariableYouWantToMap, min.ValueOfRawData, max.ValueOfRawData, min.ValueOfIdealRange, max.ValueOfIdealRange)
//in this case the min. value from the pot is 0 and max. value is 1023.
//and I want to map the background colour from black to white, 0(black) - 255(white)
float BW = map(value1,0, 400,1023, 0, PI/2255 )); rect(120,//create 80,a 220,variable 220);to popMatrix()contain the converted value
background(BW);
}
void serialEvent( Serial myPort){
val = myPort.readStringUntil('\n');
if (val != null)
{
val = trim(val);
int[] vals = int(splitTokens(val, ","));
if(vals.length >= datanum){
value1 = vals[0];
//multiple data from arduino if needed
//value2 = vals[1] ;
print(value1);
}
}
}
To use this code you will need the HCSR04 Library by Martin Sosic.
We have a tutorial on how to install a library here.