How to use a rotary encoder
What is a rotary encoder?
A rotary encoder is an electromechanical device that converts the angular position or motion of a rotating shaft into electrical signals. These signals can be processed to determine rotational direction, position, and speed, making rotary encoders a key component in many types of control systems.
Wiring
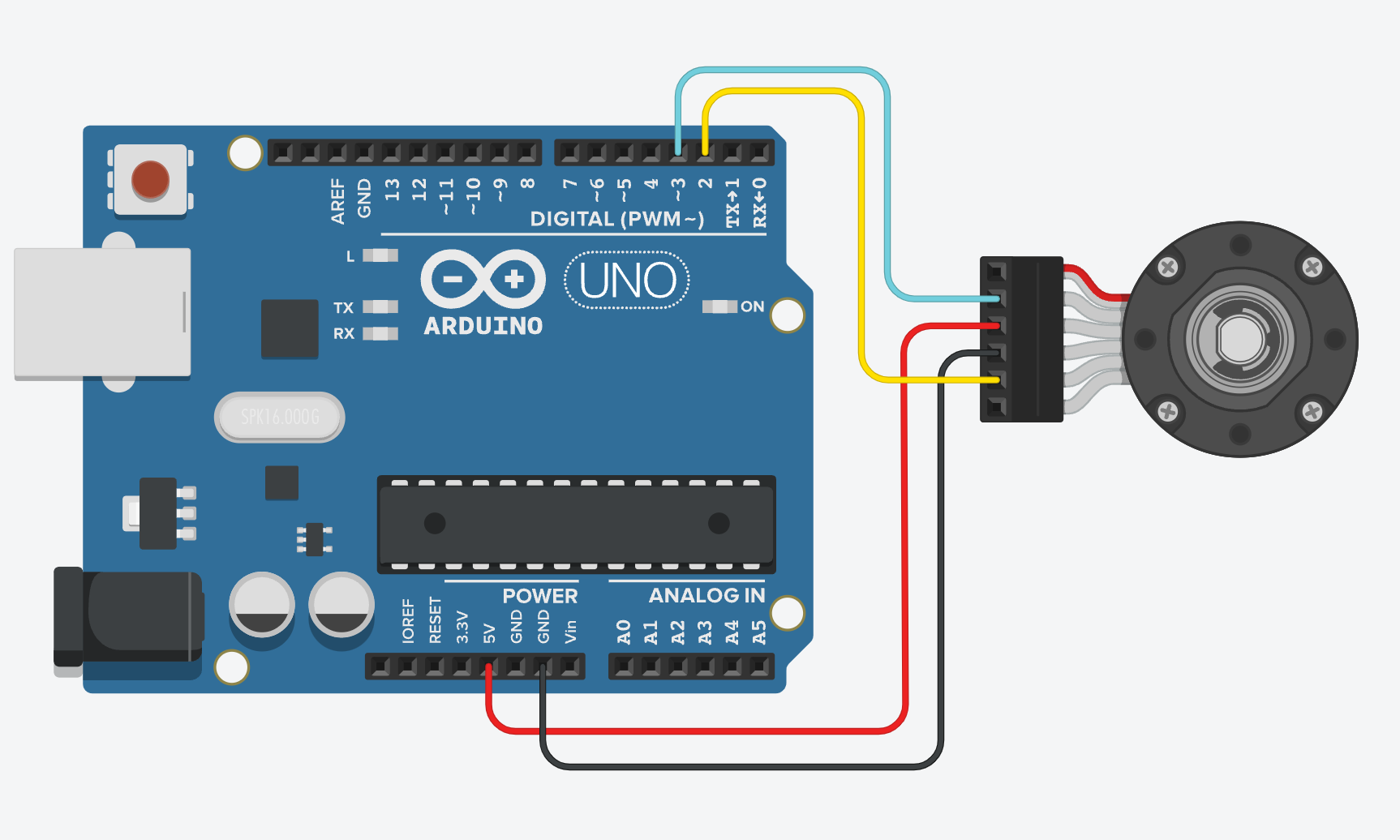
Different models of rotary encoders will have different colour codes. I am using YUMO E6B2-CWZ3E, the colours referred to below will only apply to this model.
There are four wires:
- Ground
- 5V
- A switch
- B switch

Getting started
Rotary encoders work using two switches which are operated slightly out of phase, meaning that in one direction switch A then B pulse from LOW to HIGH, and in the other direction switch B then A pulse LOW then HIGH, enabling you to detect both that a pulse happened i.e. that it was rotated, but also in which direction.
Basic Example
In this basic example the encoder outputs the value as a positive or negative number from it's starting position.
#define enc1A_pin 2
#define enc1B_pin 3
boolean enc1A_prev;
boolean enc1B_prev;
long enc1 = 0;
long prev_enc1 = 0;
void setup() {
pinMode( enc1A_pin, INPUT_PULLUP );
pinMode( enc1B_pin, INPUT_PULLUP );
Serial.begin( 9600 );
}
void loop() {
boolean enc1A = !digitalRead( enc1A_pin );
boolean enc1B = !digitalRead( enc1B_pin );
if ( enc1A_prev == 0 && enc1A == 1 && enc1B_prev == 1 && enc1B == 1 ) enc1++;
else if ( enc1A_prev == 1 && enc1A == 1 && enc1B_prev == 0 && enc1B == 1 ) enc1--;
if ( prev_enc1 != enc1 ) {
Serial.println( enc1 );
}
if ( enc1A_prev != enc1A ) enc1A_prev = enc1A;
if ( enc1B_prev != enc1B ) enc1B_prev = enc1B;
prev_enc1 = enc1;
}