Using a HC-SR04 distance sensor
What is the HC-SR04?
The HC-SR04 is a ultrasonic distance sensor, it uses ultrasound to send out a ping and measure how long the sound takes to come back, exactly like bats use to fly in the dark.
The sensor works between 2-400cm however if the ping sound is reflected away from the sensor by an a divergent (not parallel) surface, or absorbed by a soft surface like fabric there may no measurement.
There are other types of distance sensors that are more accurate for projects where needed, this is a cheap < £5 sensor, while more accurate ones are over £100.
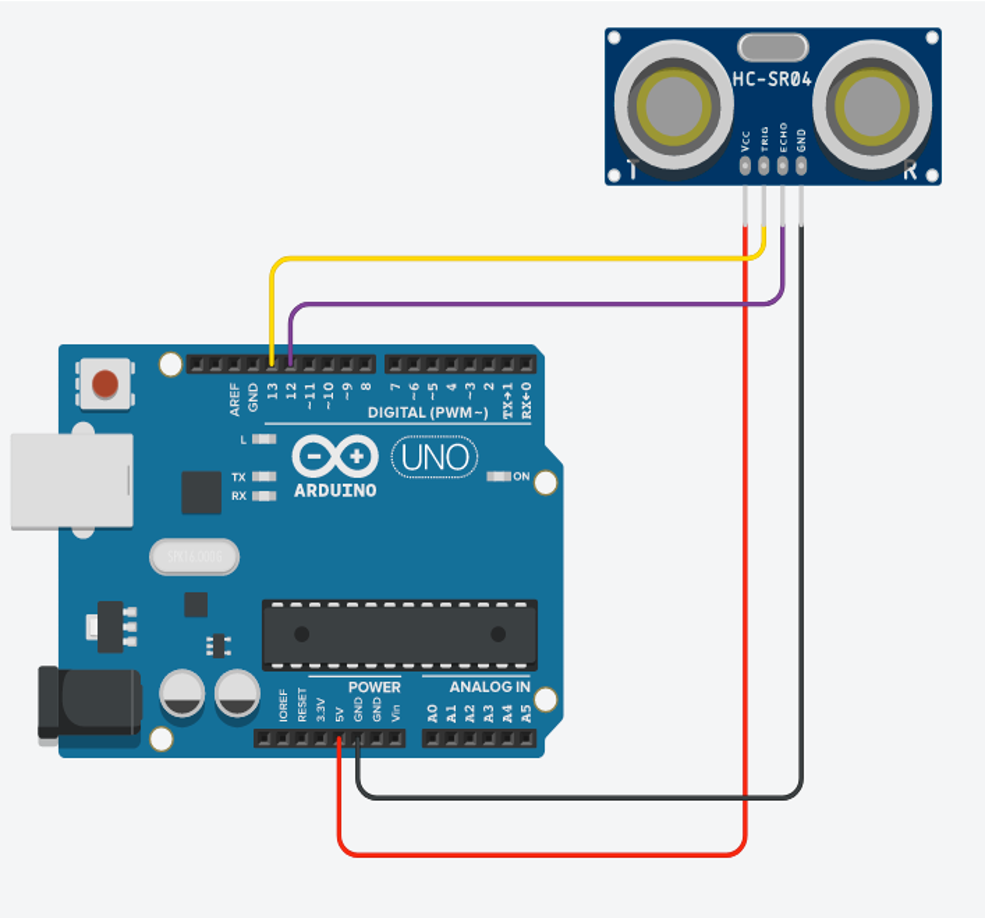
Wiring
Wiring up the sensor is simple:
- Power (VCC to 5V)
- Ground (GND to GND)
- Echo to digital pin 12
- Trigger to digital pin 13
Getting started
This example turns on an LED when the distance measured is less than 30cm and back off when the distance goes over 30cm.
#include <HCSR04.h>
// Initialize sensor that uses digital pins 13 and 12.
UltraSonicDistanceSensor distanceSensor(13, 12);
void setup () {
Serial.begin(9600); //initialize serial connection so that we could print values from sensor.
pinMode(13, OUTPUT);
}
void loop () {
// Every 0.5 second, do a measurement using the sensor and print the distance in cm.
float distance = distanceSensor.measureDistanceCm();
Serial.println(distance);
if (distance < 30 ){
digitalWrite(13, HIGH);
delay(100);
}else{
digitalWrite(13, LOW);
delay(100);
}
}
To use this code you will need the HCSR04 Library by Martin Sosic.
We have a tutorial on how to install a library here.