How to use a Rotary Encoder Button
What is a Rotary Encoder Button?
A rotary encoder button is an input device that combines: a Rotary encoder — to detect rotational direction (clockwise/counterclockwise) and steps and a Push button — to detect when the knob is pressed down. This component is smaller in size and significantly cheaper than a regular rotary encoder.
This rotary encoder is useful as a rotation sensor or selector and looks similar to potentiometers. These rotary encoders rotate all the way around continuously and are divided up into 24 'segments'. Each segment has a clicky feeling to it, and each movement clockwise or counter-clockwise causes the two switches to open and close.

Wiring
-
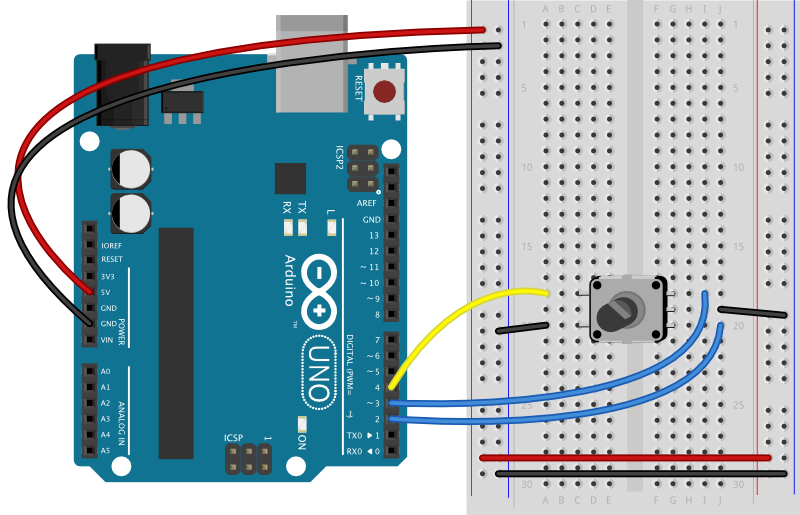
Top 2 Pins:
- one pin to D4
- one pin to GND
-
Bottom 3 Pins:
- Right Pin to D3
- middle pin to GND
- Left Pin to D2
Library
EncoderStepCounter library will be used. We have a tutorial on how to install a library here.
Getting started
#include <EncoderStepCounter.h>
const int pin1 = 2;
const int pin2 = 3;
// Create encoder instance:
EncoderStepCounter encoder(pin1, pin2);
// encoder previous position:
int oldPosition = 0;
const int buttonPin = 4; // pushbutton pin
int lastButtonState = LOW; // last button state
int debounceDelay = 5; // debounce time for the button in ms
void setup() {
Serial.begin(9600);
// Initialize encoder
encoder.begin();
// Initialize interrupts
attachInterrupt(digitalPinToInterrupt(pin1), interrupt, CHANGE);
attachInterrupt(digitalPinToInterrupt(pin2), interrupt, CHANGE);
// set the button pin as an input_pullup:
pinMode(buttonPin, INPUT_PULLUP);
}
void loop() {
// if you're not using interrupts, you need this in the loop:
encoder.tick();
// read encoder position:
int position = encoder.getPosition();
// read the pushbutton:
int buttonState = digitalRead(buttonPin);
// // if the button has changed:
if (buttonState != lastButtonState) {
// debounce the button:
delay(debounceDelay);
// if button is pressed:
if (buttonState == LOW) {
Serial.print("you pressed on position: ");
Serial.println(position);
}
}
// save current button state for next time through the loop:
lastButtonState = buttonState;
// reset the encoder after 24 steps:
if (position % 24 == 0) {
encoder.reset();
position = encoder.getPosition();
}
// if there's been a change, print it:
if (position != oldPosition) {
Serial.println(position);
oldPosition = position;
}
}
// Call tick on every change interrupt
void interrupt() {
encoder.tick();
}